Right now I’m trying to go through the Runner Tutorial, but…
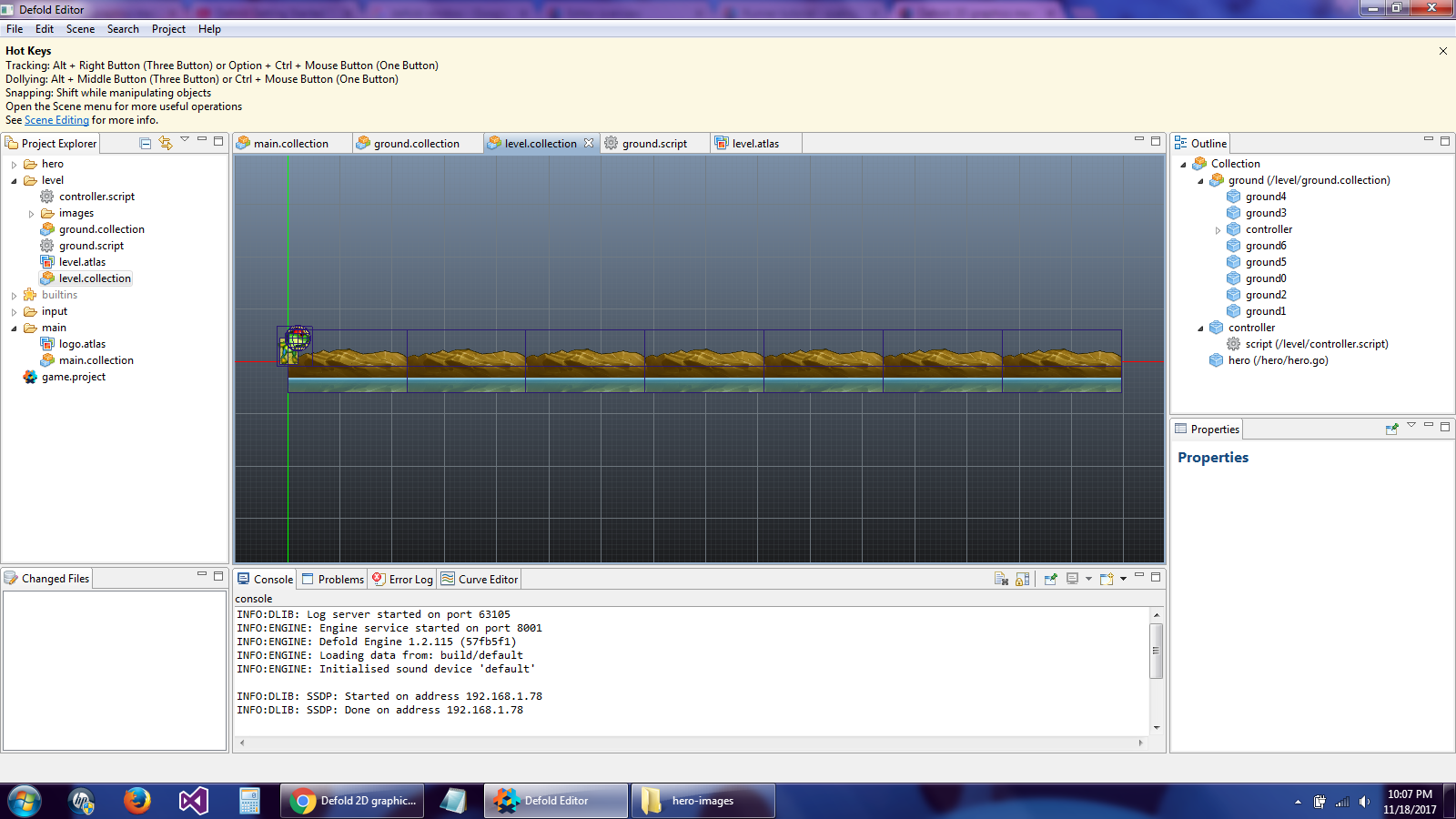

…it seems that the ground sprites only partially appear on screen. Furthermore, everything moves very, very fast - faster than I believe it’s supposed to. Can someone explain what causes this behavior and how to fix it?